Payload Insertion System
An open-source 6 degree-of-freedom (DOF) robotic arm will be used to reliably and effectively capture the standard Maxi-MAV payload, transport and load it into the nose cone of the launch vehicle. Utilizing a set of hard-coded positions/servo angles for the robotic arm and a known payload position relative to the AGSE, the robotic arm will be capable of accomplishing autonomous payload capture and retrieval.
In an unpredictable environment, the AGSE will have to be adaptive and reactive according to external conditions and events. A direct payload retrieval mechanism involves utilizing a robotic arm. In today’s market, robotic arms have degrees of freedom ranging from three to seven and are sold by various vendors. The team surveyed robotic arms with six or more degrees of freedom since such a design choice will allow for a fully solvable space.
Customizations are often limited with pre-designed robotic arms from selected vendors. Therefore, the team utilizes open-source templates for customizable robotic arm from the website www.thingiverse.com. All robotic arms available on this site comes with sketched .STL files which can modified and customized to specific needs before being cut by laser printers. This allows the team to select specific materials based on remaining budget and weight requirements.
Robotic arms online can range from $100 to $10,000 depending on the precision required and advanced control algorithms that the manipulator ships with. Since the team is limited by a budget, and since the AGSE subgroup is limited to a portion of this allowable budget, the plan is to build a "basic" version of the arm, and then expand on it afterwards if budget allows. By leveraging open-source design, the required budget, aside from material cost, can be broken down into the price of specific parts (servos, screws, and etc.), and can be adjusted based on decision choices.
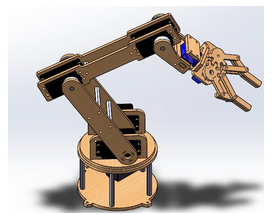
The team will construct a six DOF arm composed on wood. Utilizing seven servos, the arm will be able to fully solve for any point in the space. The gripper design will be modified to allow greater degree of error. This can be achieved by designing the gripper with “encompassing” interiors which will naturally move the payload into the grooves. This will allow for multiple positions from which the robotic arm can successfully grip the payload. A SolidWorks model of this robotic arm is shown below.